Mechanical Design I (ME 370), a staple of MechSE’s design curriculum, introduces students to machine design from a linkage and gear train perspective while incorporating a focus on user-centered design. Every semester the course challenges students with two design projects; this semester, they were tasked with designing a robot that took inspiration from American Ninja Warrior, the show where contestants often distinguish themselves with strong personalities, pithy names, and bright color schemes.
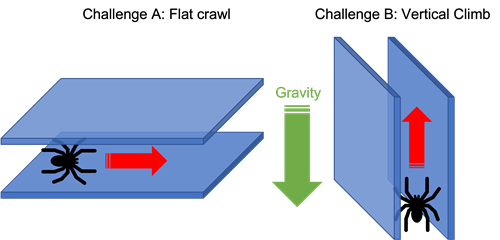 Their climbing robots had to complete two challenges moving between two parallel, narrowly spaced plates in different configurations (shown at right)—a horizontal army crawl and a vertical climb. The course was led by Professor Gaurav Bahl and Associate Professor Arend van der Zande.
Their climbing robots had to complete two challenges moving between two parallel, narrowly spaced plates in different configurations (shown at right)—a horizontal army crawl and a vertical climb. The course was led by Professor Gaurav Bahl and Associate Professor Arend van der Zande.
The robot had to be:
- A stable, self-contained climber using a provided geared motor and batteries to drive it.
- Able to walk, swing, slide, or leap between the plates using grippy legs, pincers, body, or feet. Wheels, rotating spokes, or treads were not allowed.
- fully autonomous, with no external control.
- Through good design, must be balanced and able to stay attached between the plates and be self-righting under small slips or sticks while operating open loop (no feedback control).
- Thrill, amaze, amuse, and educate the viewer. Teams earned significant bonuses for creativity and aesthetics.
Throughout the semester, student teams took their robots from the concept stage, through design and prototyping, to iteration and optimization. Their designs were not constrained to emulating human motion but they were expected to draw from biomimetic design – i.e. chimney like a rock-climber, slither like a snake, hop like a spider, slide like a worm, climb like a monkey, or inch like a caterpillar.
Watch the robots in action! >>
Performance Award Winners:
- 1st Place: Team 9 (9 seconds)
- 2nd Place: Team 15 (16 seconds)
- 3rd Place: Team 20 (21 seconds)
- Special mention: Team 22 (10 seconds, but winning design award) and Team 27 (fastest on horizontal challenge)
Design Award Winners:
- 1st Place: Team 22
- 2nd Place (tie): Team 21 and Team 27
- 3rd Place: Team 17
- Runner Up: Team 9 (winning performance award)